스마트팩토리 구축을 위한 AMR 솔루션
왜 ㈜케이피씨전자의 AMR이어야 할까요?

AGV vs AMR

|
무인 운송 차량(AGV): Automated Guided Vehicle바닥에 설치된 표시물 또는
위해 비전, 자석, 레이저 사용 |

|
자율주행 로봇(AMR): Autonomous Mobile Robot자율주행 알고리즘을 통해
스스로 선택해서 주행 |
| 구분 | 무인 운송 차량(AGV) | 자율주행 로봇(AMR) |
|---|---|---|
| 셋업 | 주행 경로 설계 필요 | 단순한 Mapping으로 가능 |
| 네비게이션 | 센서 등의 물리적 가이드 필요 | 물리적 가이드 없는 자율주행 |
| Map, 레이아웃 변환 | 공장 Infra 변경 필요 | 쉬움 |
| 확장성 | 공장 Infra 변경 필요 | 용이 |







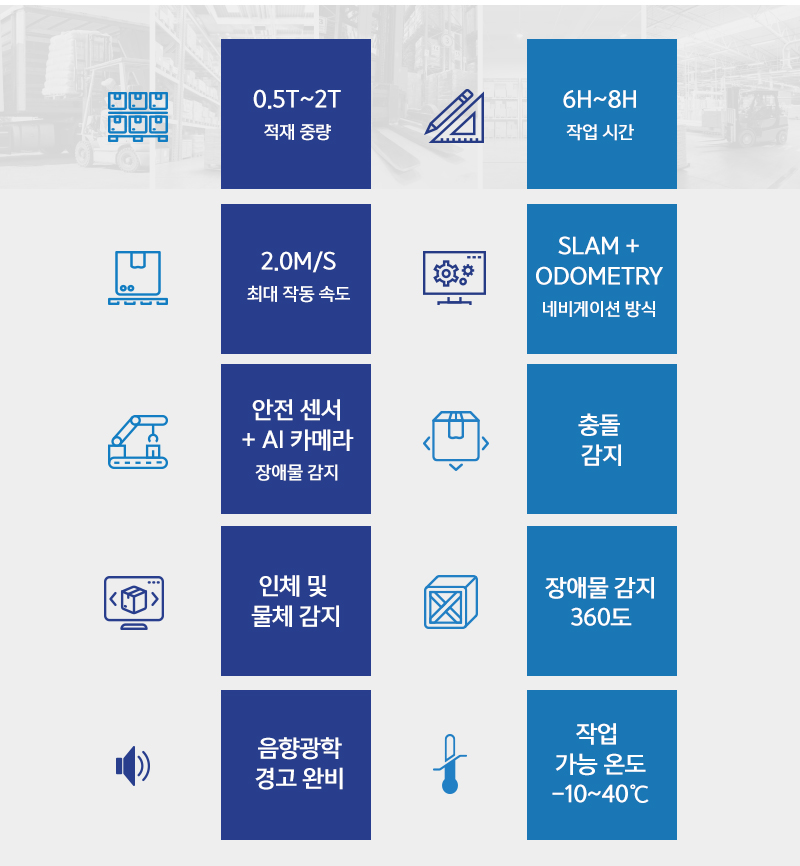

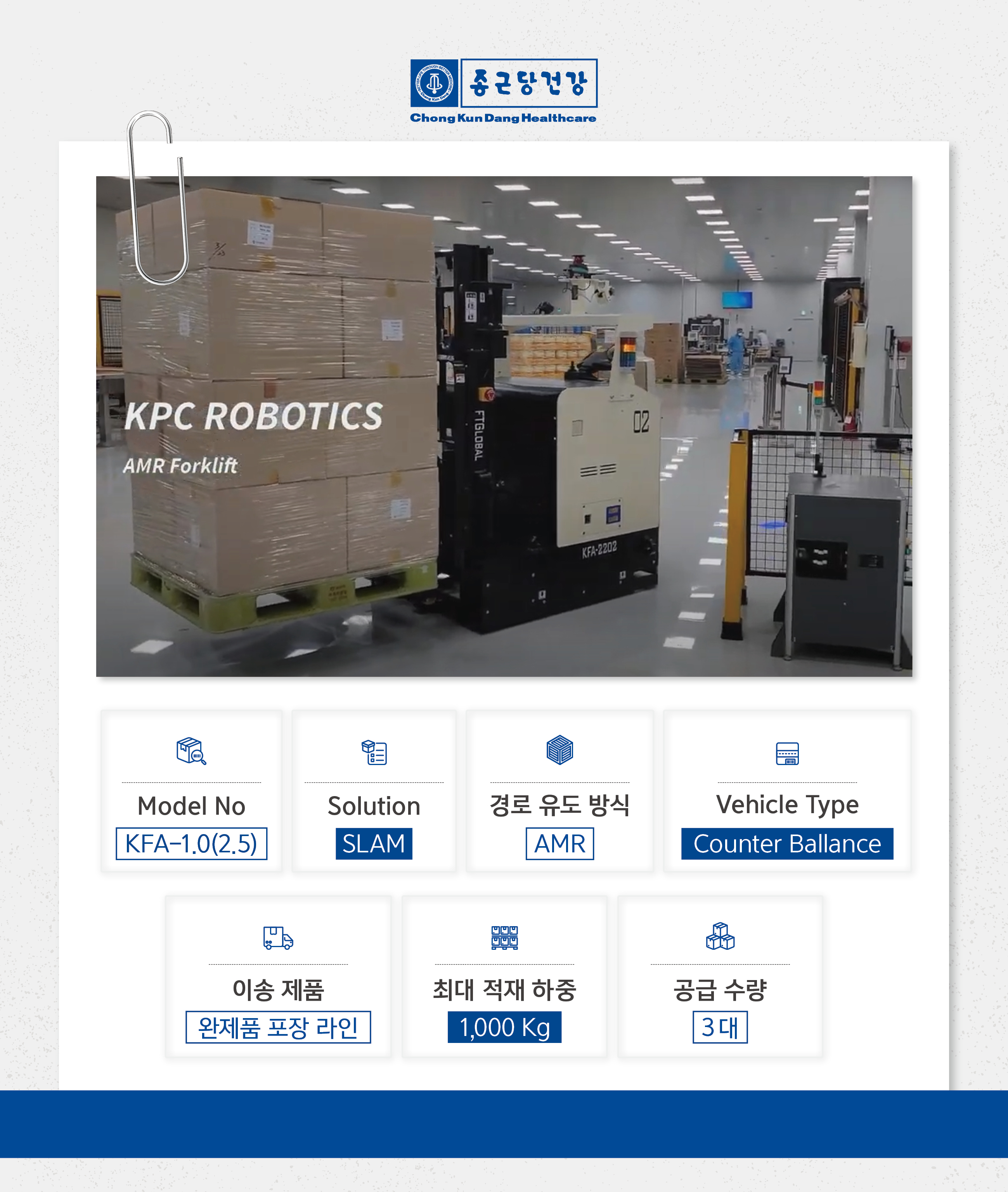
| SPEED (MAX) | FORWARD/REVERSE 2.0 M/SEC |
| ACCURACY OF DRIVING POSITION | ±10MM |
| ACCURACY OF FORK HEIGHT | ±5MM |
| EMERGENCY STOP RESPONSE TIME | 30MSEC OR LESS |
| SIMULTANEOUS USE AMR | 100 UNITS/SYSTEM |
| USAGE TIME | 6~8 HOURS CONTINUOUS/1.5 HOURS CHARGING |
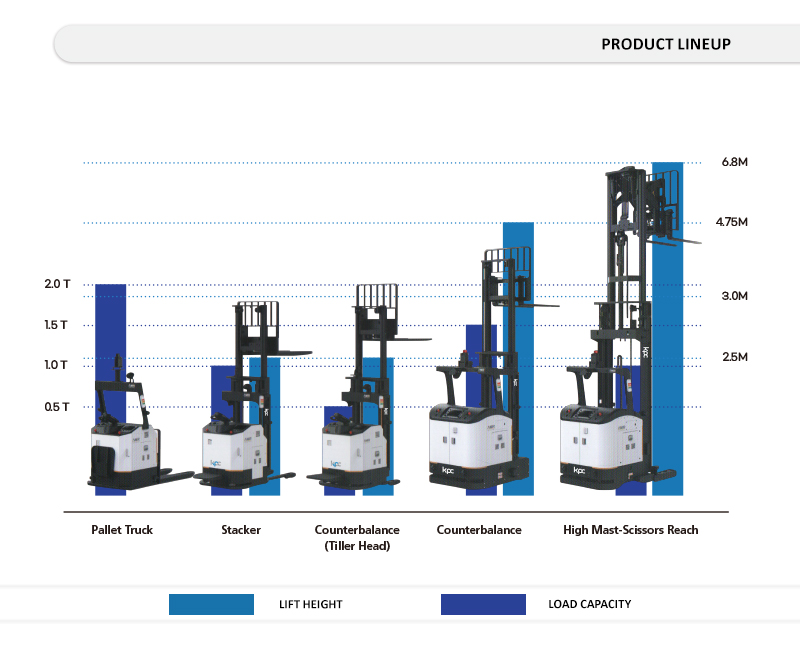
| WEIGHT(VEHICLE/PAYLOAD) | 1~3.5 TONS / 0.5~2 TONS |
| NAVIGATION LIDAR | MEASURING DISTANCE, 200M |
| BATTERY | LI-ION / 24V 150A, 48V 150A |
| MOTOR AND CONTROLLER | 3.5KW/ AC 48V |
| MAIN CONTROLLER PLC PROGRAM | CODESYS V3 |
| COMMUNICATION MODULE | INDUSTRIAL WIFI 2.4G/5G |
| SAFETY | SAFETY LIDAR/4 EA, EMERGENCY STOP BUTTON/4 EA, CAMERA/3 EA(OPTION), SOFTWARE FOR EMERGENCY |
| CAMERA | FHD(1920*1080), AUTO FOCUS, USB/LAN |
| AMR MAIN CONTROLLER | ANT LITE+ |
| AI SERVER(OPTION) | NVIDIA CUDA |
| ACS MASTER | WINDOW(CUSTOMIZED APPLICATIONS) |
| ACS MONITOR | WINDOW(CUSTOMIZED APPLICATIONS) |
| TABLET CONTROL PANEL(OPTION) | APP |
| MODBUS TCP/IP | 10MSEC |
| HTTP/REST | 20MSEC |
| FORMAT | JSON |